Плюсы и минусы
Рассматриваемые силовые агрегаты обладают целым набором особенностей, и, если сравнивать их с шаговыми, можно выделить ряд достоинств.
В числе объективных преимуществ:
- точное, зачастую даже прецизионные позиционирования;
- быстрое повышение крутящего момента и понижение числа оборотов за счет использования редуктора;
- беспроблемная коррекция – внести в программу изменения можно за считаные минуты, отрегулировав перемещение рабочего инструмента по первым полученным практическим результатам;
- отличная переносимость физических, температурных и других нагрузок в течение длительного времени безостановочной эксплуатации;
- развитие значительных ускорений, обеспечивающее замечательную совместимость с быстродействующим оборудованием, например, с универсальными станками ижевского ;
- поддержание равномерного крутящего момента во всем рабочем диапазоне.
Использование сервопривода не тотальное только потому, что он также обладает некоторыми недостатками.
В списке относительных минусов:
- при наличии пластиковых шестеренок или деталей из мягкого металла редуктор становится «слабым звеном», выходящим из строя под интенсивными воздействиями;
- резистивные дорожки изнашиваются в сравнительно краткие сроки (актуально для моделей с потенциометром);
- такой силовой агрегат стоит дороже шагового;
- программа, подходящая для обеспечения высокой точности, на практике часто оказывается сложной в настройке.
Ясно, что преимущества оказывают гораздо более важное влияние, и именно они обуславливают значительную степень востребованности в самых различных сферах

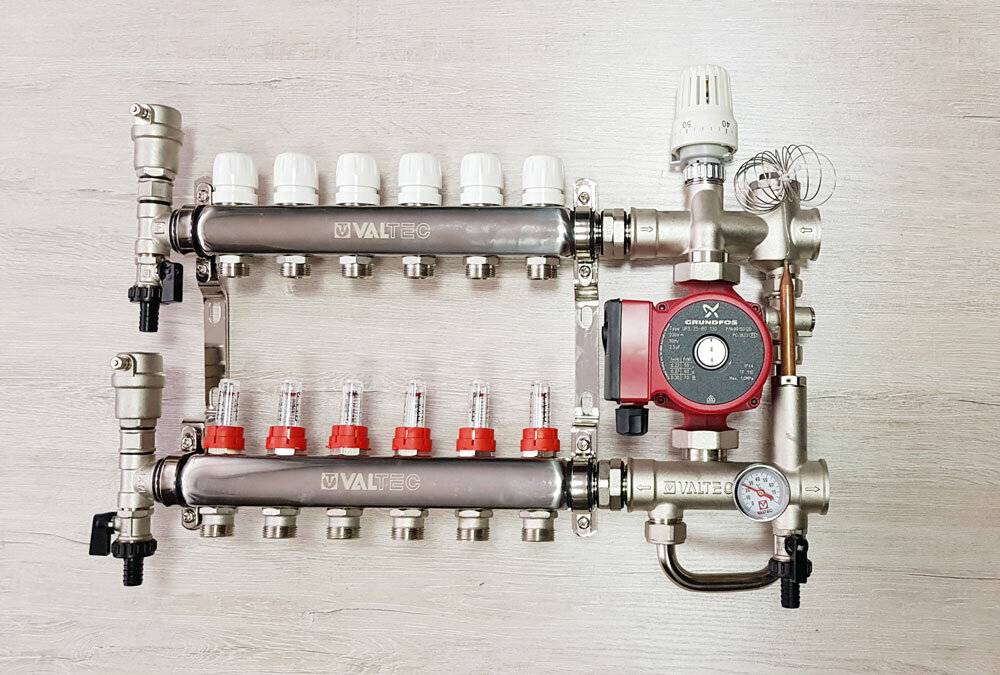
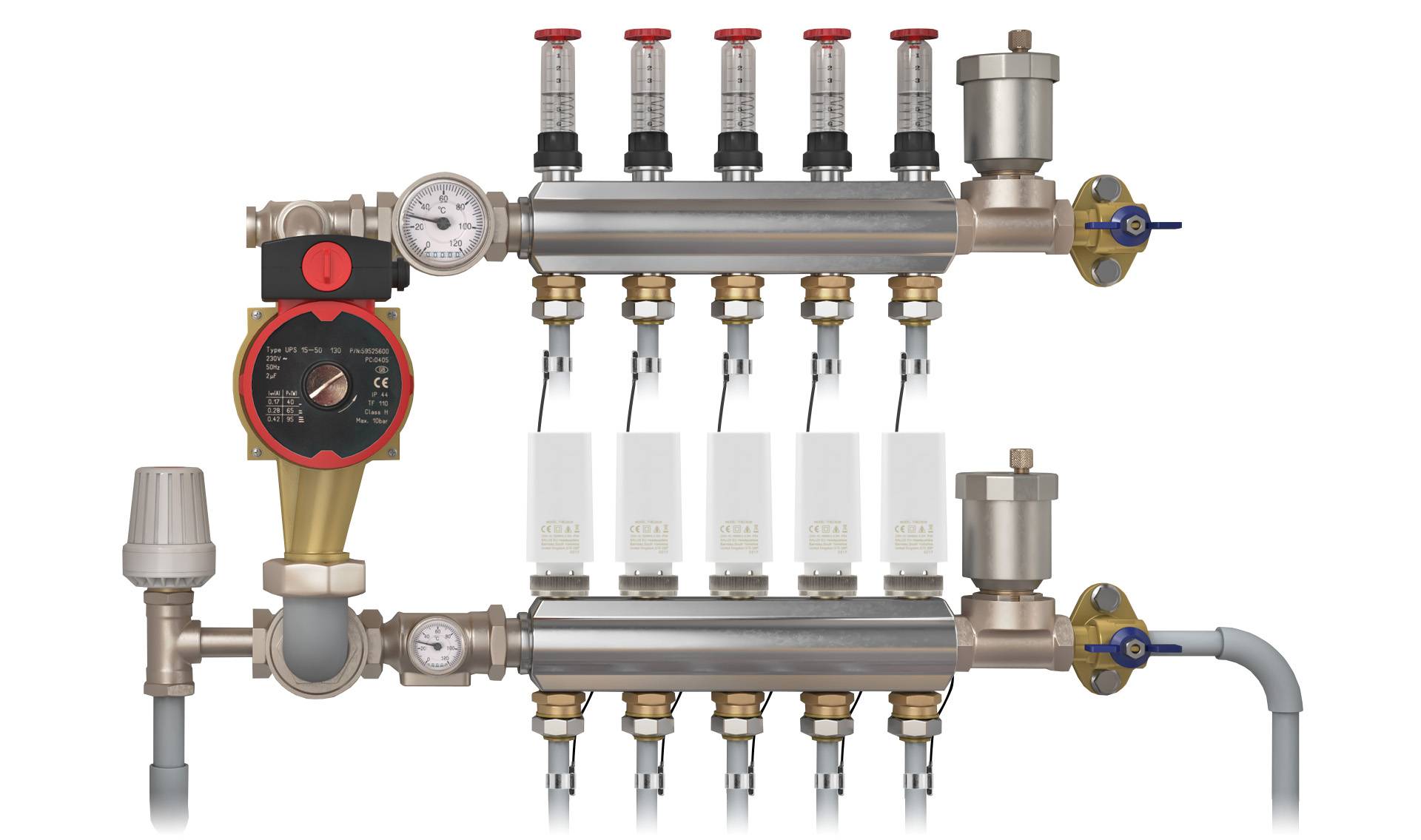
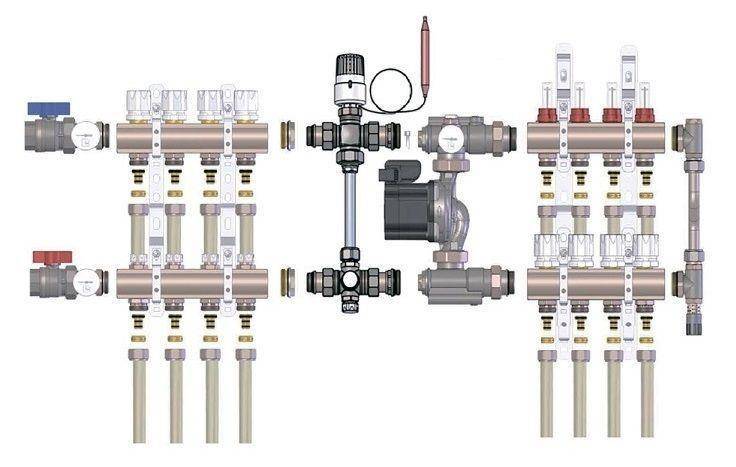
Комплектация коллекторных групп
К коллектору присоединяется группа для теплого пола – совокупность различных элементов и оборудования. В прямой зависимости от комплектации находится цена на коллектор. Для удобства можно разделять комплектацию на четыре группы — от самой простой к самой сложной:
- Самый простой в сборе вариант – коллектор с выходами под евроконусы. По сути это обычный патрубок с внешними и внутренними резьбами, к которым подсоединяют трубопровод. Его можно сделать самостоятельно, но для применения в системе теплого пола необходимо будет докупить остальные элементы узла.
- Следующий вариант — выходы коллектора оборудованы вентилями регулировки потока, которые стоят на месте подключения трубопроводов контура. Этот популярный вид коллекторов в основном произведен в Китае. Встречающаяся проблема в таких вентилях — подтекающие ручки регулировки. Избавиться от проблемы можно, заменив уплотнительные кольца. Эта коллекторная группа не рассчитана на установку дополнительных элементов. Применять такой коллектор можно в системах с одинаковыми контурами без автоматического регулирования температуры.
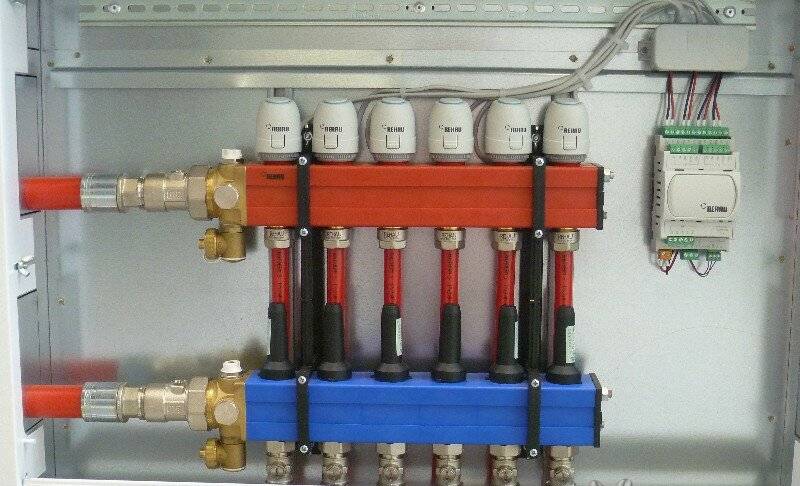
- Еще более дорогой коллекторный узел для теплого пола — когда на выходах установлены регулировочные вентили оборудованные сервоприводами. Они могут работать с термостатами. Также, в комплектации предусмотрены фитинги для присоединения труб из полипропилена. Цена такого коллектора сильно зависит от производителя и вида сервоприводов.
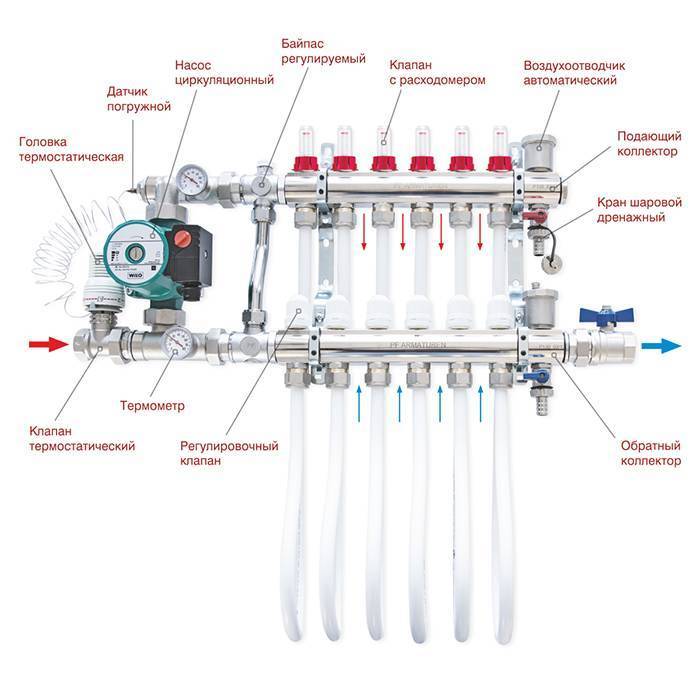
- Самый полный вариант состоит из подающего коллектора с расходомерами для теплого пола и обратного с сервоприводами. Применяют такие группы при разнодлинных контурах отопления, где отрегулировать подачу теплоносителя вручную не представляется возможным. Расходомер для теплого пола дает возможность отстроить отдельно каждый контур.
Подающий коллектор должен располагаться выше обратного. Это поможет избежать нагрева элементов, установленных на обратке, например, термостатических головок, что приведет к неправильному функционированию всей системы.
Если стоит задача разработать систему отопления с максимальной эффективностью, независимо от ее сложности, рекомендуется применение сервоприводов для регулировки температуры теплоносителя.
Схема и типы сервоприводов

Принцип работы сервопривода основан на обратной связи одного или нескольких системных сигналов. Индикатор вывода отправляется на вход, где его значение сравнивается с эталонным действием и выполняются необходимые действия, например, двигатель выключается. Самая простая реализация — переменный резистор, управляемый валом: при изменении параметров резистора изменяются параметры тока, который подает двигатель.
В реальных сервоприводах механизм управления намного сложнее и использует встроенные контроллеры. В зависимости от типа используемого механизма обратной связи бывают аналоговые и цифровые сервоприводы. Первые используют что-то похожее на потенциометр, вторые используют контроллеры.

Вся схема сервоуправления расположена внутри корпуса, управляющие сигналы и питание подаются, как правило, по трем проводам: заземление, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Существует два основных типа серводвигателей: с непрерывным вращением и с фиксированным углом (чаще всего 180 или 270 градусов). Разница между сервоприводом ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала за пределами заданных углов. Достигнутый угол 180, вал будет воздействовать на ограничитель и давать команду на остановку двигателя. Непрерывные серводвигатели таких ограничителей не имеют.
Материалы шестерней сервопривода
В большинстве сервомашинок соединение между валом и внешними элементами представляет собой шестерню, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластиковые шестерни
В более дорогих моделях можно встретить элементы из карбона и даже титана.


Варианты из пластика, конечно, дешевле, проще в производстве и часто используются в недорогих моделях сервоприводов. Для образовательных проектов, когда слуга делает несколько движений, это не имеет большого значения. Но в серьезных проектах использование пластика невозможно, так как такие шестерни очень быстро изнашиваются под нагрузкой.

Металлические шестерни более надежны, но это однозначно сказывается как на цене, так и на весе модели. Экономные производители могут делать некоторые детали из пластика, а некоторые из металла, об этом тоже нужно помнить. И, конечно же, в более дешевых моделях даже наличие металлической шестерни не является гарантией качества.
Если у вас ограниченный бюджет, предпочтительны шестерни из титана или углерода. Легкие и надежные, эти сервоприводы широко используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое распространение сервоприводов связано с тем, что они обладают стабильной работой, высокой помехоустойчивостью, небольшими размерами и широким диапазоном регулирования скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечивать обратную связь по информации. Отсюда следует, что в прямом направлении схема представляет собой передатчик энергии, а в обратном направлении — передатчик информации, который используется для повышения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электродвигатель, мы можем создать вращательное движение и заставить двигаться колеса или другие объекты, прикрепленные к валу. Это движение будет непрерывным, но чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, необходимо будет установить дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и может отключиться при повороте вала на требуемый угол.
Отличия серво и шагового мотора
Важное различие между серводвигателем и шаговым двигателем — это способность работать при высоких ускорениях и при переменной нагрузке. К тому же серводвигатели более мощные
У шаговых двигателей нет обратной связи, поэтому эффект потери шага можно наблюдать, в серводвигателе потеря шага исключена — все нарушения будут фиксироваться и исправляться. При всех этих очевидных преимуществах серводвигатели дороже шаговых двигателей, имеют более сложную проводку и системы управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводы не являются прямыми конкурентами — каждое из этих устройств имеет свою специфическую область применения.




vri-cnc.ru
Шаговые двигатели – дешевле. Однако сервоприводы обладают широким рядом достоинств, в том числе высокой производительностью и точностью позиционирования. Так что же выбрать?
Что такое шаговый электродвигатель
 Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговый электродвигатель – это безщеточный синхронный электродвигатель постоянного тока, имеющий несколько обмоток статора. При подаче тока в одну из обмоток ротор поворачивается, а затем фиксируется в определенном положении. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол.
Шаговые электродвигатели широко применяются в промышленности, так как имеют высокую надежность и длительный срок службы. Главное преимущество шаговых двигателей – точность позиционирования. При подаче тока на обмотки ротор провернется строго на определенный угол.
Положительные стороны шагового двигателя
·Устойчивость в работе;
·Высокий крутящий момент на малых и нулевых скоростях;
·Быстрый старт, остановка и реверс;
·Работа под высокой нагрузкой без риска выхода из строя;
·Единственный механизм износа, влияющий на длительность эксплуатации – подшипники;
·Невысокая стоимость.
Отрицательные стороны шагового двигателя
·Высокий уровень шума;
·Возможность появления резонанса;
·Постоянный расход электроэнергии вне зависимости от нагрузки;
·Падение крутящего момента на высоких скоростях;
·Отсутствие обратной связи при позиционировании;
·Низкая пригодность к ремонту.
Что такое серводвигатель (сервопривод)
 Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Конструктивные особенности электродвигателей для сервопривода мало чем отличаются от обычных электродвигателей имеющих статор и ротор, работающих на постоянном и переменном токе, с щетками и без щеток. Особую роль здесь играет датчик обратной связи, который может быть установлен как непосредственно в самом двигателе и передавать данные о положении ротора, так и определять его позиционирование по внешним признакам. С другой стороны, работа серводвигателя немыслима без блока питания и управления (он же инвертор или сервоусилитель), который преобразует напряжение и частоту тока, подаваемого на электродвигатель, тем самым управляя его действием.
Положительные стороны серводвигателя (сервопривода)
·Высокая мощность при малых размерах;
·Высокий крутящий момент;
·Быстрый разгон и торможение;
·Постоянное и бесперебойное отслеживание положения;
·Низкий уровень шума, отсутствие вибраций и резонанса;
·Широкий диапазон скорости вращения;
·Высокая скорость разгона;
·Точное позиционирование;
·Стабильная работа в широком диапазоне скоростей;
·Малая масса и компактная конструкция;
·Низкий расход электроэнергии при малых нагрузках.
Отрицательные стороны серводвигателя (сервопривода)
·Требовательность к периодическому обслуживанию (например, с заменой щеток);
·Дорогостоящий ремонт;
·Сложность устройства (наличие датчика, блока питания и управления) и логики его работы.
·Высокая стоимость.
Сервопривод или шаговый двигатель?
Сравнивая характеристики сервопривода и шагового двигателя, следует обратить внимание, прежде всего, на их производительность и стоимость. Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла
Для производства фасадов МДФ на небольшом предприятии, работающем с малыми объемами, думаю, нет необходимости переплачивать за установку на фрезерный станок с ЧПУ дорогостоящих серводвигателей. С другой стороны, если предприятие стремится выйти на максимально возможные объемы производства, то дешевить на низкопроизводительных шаговых двигателях для ЧПУ не имеет смысла.



4.7. Устойчивость усилителей с обратной связью
Усилители с ООС при определённых условиях могут самовозбуждаться, т.е. генерировать электрические колебания. Это свидетельствует о том, что усилитель прекращает свои функции по усилению электрических колебаний. При этом ООС превращается в ПОС. это происходит обычно за пределами рабочего диапазона частот из-за фазовых сдвигов в усилителе и в цепи обратной связи. Фаза как аргумент вектора петлевого коэффициента передачи Т изменяется:
Т = – β·К·е j∆φβК;
где величина ∆φβК определяется как сумма фазовых сдвигов в усилителе и в четырёхполюснике обратной связи:
∆φβК = ∆φК + ∆φβ ; (4.13)
Уравнение (4.13) определяет дополнительный фазовый сдвиг к 180º между векторными источниками сигнала UВХ.ИСТ и UВХ.СВ., т.е. (180º + ∆φβК). Причиной изменения фазы являются реактивные элементы схемы, а на высоких частотах дополнительно инерционность работы усилительных элементов.
При ООС и ПОС величина Т является действительной:
FООС = 1 + ТООС > 1;
FПОС = 1 – ТПОС < 1;
Пока ТПОС < 1, усилитель не возбуждается, хотя ООС превращается в ПОС, т.е. она оказывается ещё недостаточно глубокой для самовозбуждения. Генерация наступает при:
ТПОС = 1;
и коэффициент усиления с обратной связью будет иметь бесконечно большое значение:
Практически усилитель возбуждается на низких и высоких частотах при:
ТПОС ≥ 1 и φβК= 180º + ∆φβК
Для оценки устойчивости усилителя с обратной связью используются различные критерии. Наиболее приемлемым оказался критерий Найквиста, который заключается в следующем: “Если точка с координатами (–1;0) лежит внутри годографа вектора β К для диапазона частот от 0 до ∞, то система неустойчива, рис. 4.7а; если же точка (–1;0) лежит вне указанного годографа, система устойчива, рис. 4.7б”
Рис. 4.7. Диаграммы Найквиста для неустойчивого а) и устойчивого усилителей б) с обратной связью.
Для повышения устойчивости усилителей разработаны методы, суть которых сводится к следующему.
- В усилителе с обратной связью следует охватить как можно меньше число каскадов, т.к. это уменьшает сдвиг фаз петли обратной связи
- Применять в охваченных обратной связью каскадах схемы межкаскадовой связи, дающие малые фазовые сдвиги.
- При проектировании усилителей задаются допустимой степенью приближения годографа Т к критической точке; эта степень получала название запаса устойчивости усилителя. Различают запас устойчивости по модулю “X”
X = – 20lg |TX| при arg TX = π; и запас устойчивости по фазе “Y”;
πY = π – arg T при |TX| = 1
Для групповых усилителей, имеющих глубокую ООС принимают запасы устойчивости: по модулю 3n дБ, а по фазе 0,175 рад (10n град.), где n – число усилительных каскадов.
Какие сервоприводы применяются?
Широкое распространение серводвигателей повлекло за собой появление их различных видов, которые можно разделить по следующим критериям:
Типы привода:
Линейные – самый быстрый разгон, высокая точность, долговечность. Примеры: актуатор, линейный модуль (см. рис.), линейные серводвигатели. |
|

Принцип действия:
Материал редуктора:
|
| Тип ротора: Монолитный ротор – вибрирует при вращении, невысокая точность; |
Способ управления:
|
Как работает клешня «хватайки»
Как конкретно работает клешня, в профессиональном аппарате, я не разглядел, поскольку механика была прикрыта защитным кожухом, поэтому пришлось поэкспериментировать. Поломав некоторое время голову, получилось придумать более-менее рабочий вариант: клешня состоит из четырех «пальцев», которые одним концом фиксируются на неподвижной раме. Так же добавил крестовину, с ней «пальцы» имеют шарнирное соединение примерно посередине. К неподвижной части рамы жестко зафиксировал сервопривод, качалка которого опускает и поднимает ось. Крестовина в свою очередь жестко закреплена к оси и вместе с ней совершает движения вверх и вниз, из-за чего и происходит сжатие и раскрытие клешни. Чтобы было понятнее, ниже находится картинка с клешней. Изображение можно вращать с помощью мышки, зажав ЛКМ и перемещая влево или вправо.
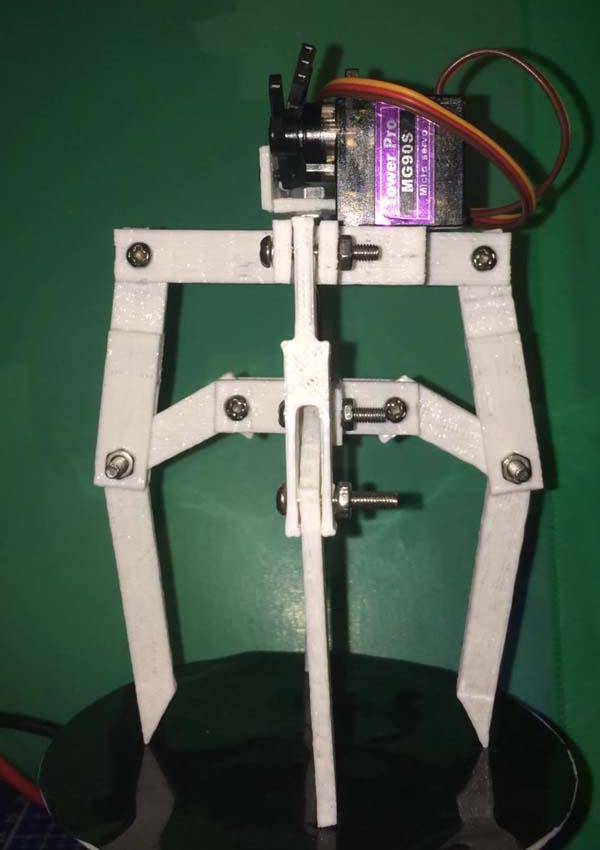
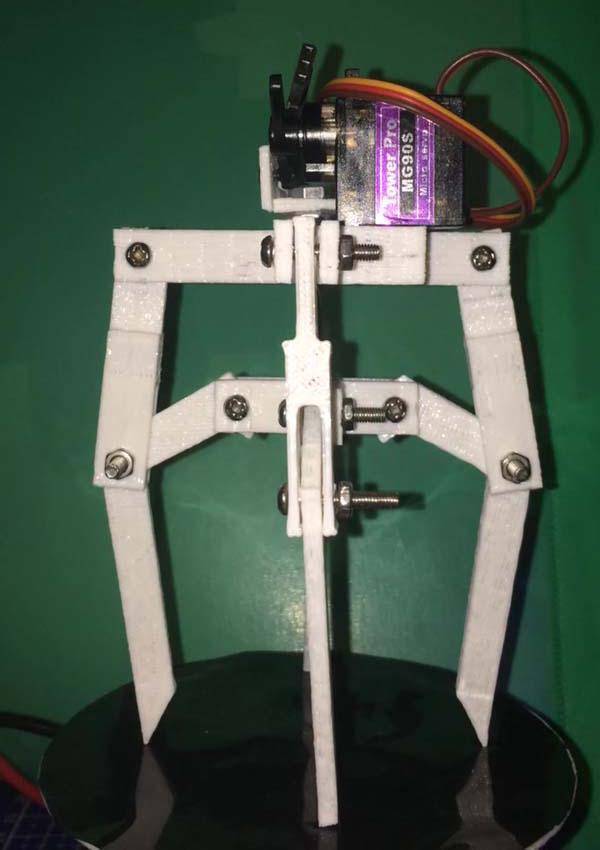
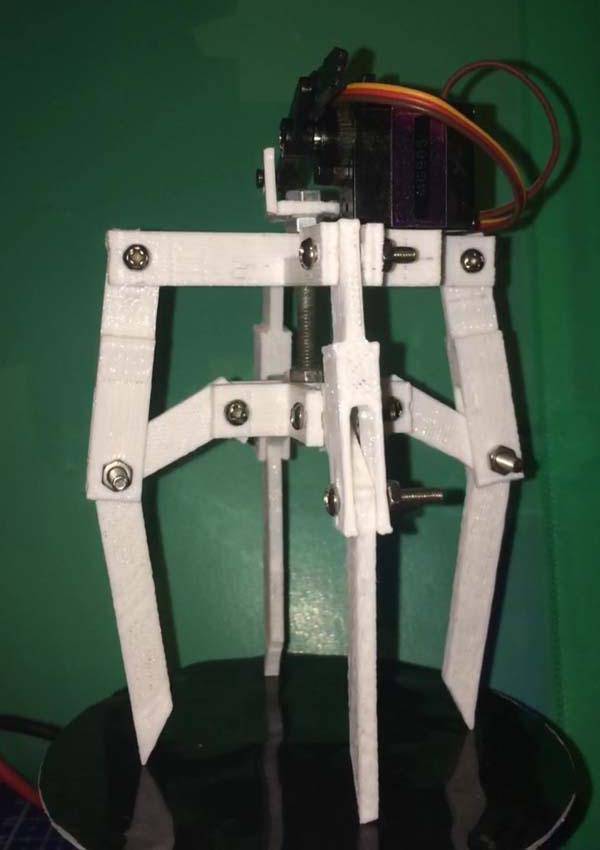









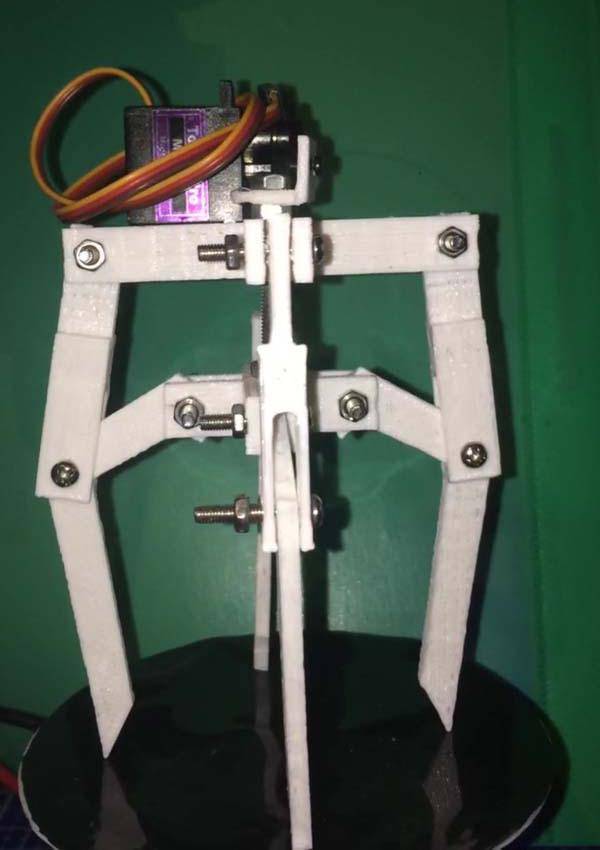

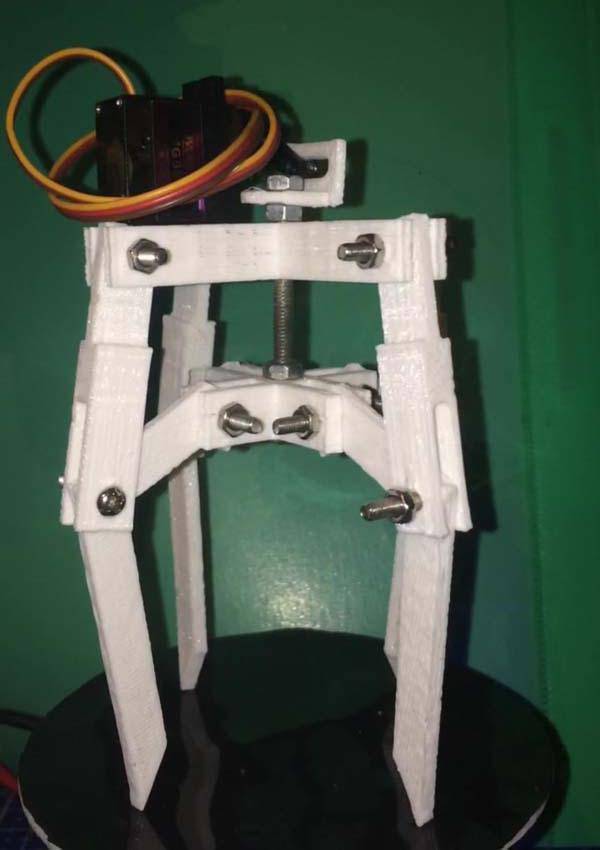






С изготовлением клешни особо не мучался и напечатал ее на 3D принтере.
Зачем нам дополнительное питание?
Первые мои эксперименты с сервомотором заканчивались всегда одинаково – непредсказуемое поведение. То есть, с кетч содержал команду “Повернуться на 90 градусов и замереть на 2 секунды”. Результат совершенно иной – сервомотор елозил туда-сюда и угол поворота был совсем не 90 градусов. Что говорить про “замереть на 2 секунды”, такого вообще не было – постоянно в движении. Много раз проверял правильность сборки схемы, экспериментировал со скетчем, углами поворота и задержками – ничего ен помогало. Как вы догадались, серве просто не хватало питания (малышка недоедала). После подключения отдельного питания все встало на свои места, серва, наконец, начала слушаться.
Алгоритм работы
Все предельно просто: мы будем считывать наклон джойстика и в ращать серву на соответствующее отклонение. Понятно, что из всех возможностей джойстика я использовал только отклонение по оси Х, ибо серва вверх-вниз поворачиваться не умеет (хотя это хорошее решение для второй сервы, где они вместе могут управлять положением камеры, например FPV на квадрокоптере)
Собираем все вместе
Схема сборки очень простая – джойстик подключаем к Arduino, а сервомотор к внешнему питанию и Arduino, для передачи ей сигналов. К сожалению не нашел подходящей картинки, так что приложу схему подключения джойстика, а подключить серву можно самостоятельно, главное сделать ей выделенную линию питания и свести землю в одну точку, иначе не заработает.
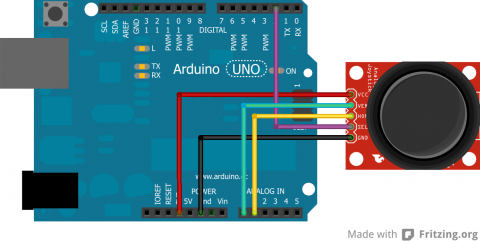



![Сервоприводы pdm постоянного вращения: особенности применения и примеры кода [амперка / вики]](https://gaz-pgo.ru/wp-content/uploads/4/b/d/4bd508eed7fa7d11bbb28fd84fb3cdb7.jpeg)



Скетч
/**
* Вращение сервомотора под управлением джойстика
*/
#include <Servo.h>
Servo servo;
int servoPin = 9; // Пин для сервы
int ledPin = 13; // Пин светодиода (здесь встроеный светодиод)
int switchPin = 2; // Пин кнопки джойстика
int xPin = A0; // Пин для считывания по оси X
int yPin = A1; // Пин для считывания оси Y
void setup() {
// Ставим соответствующие атрибуты для пинов
pinMode(ledPin, OUTPUT);
pinMode(switchPin, INPUT);
pinMode(xPin, INPUT);
pinMode(yPin, INPUT);
// подцепляем серву
servo.attach(servoPin);
// Ждем секунду
delay(1000);
// Ставим положение сервы на 90 градусов
// т.к. джойстик по умолчанию стоит по центру
// (вообще не обязательная команда)
servo.write(90);
// Моргнем 4 раза, сказав, что мы закончили с первоначальными настройками
// За это время серва точно доберется до положения в 90 градусов
for (int i = ; i < 4; ++i) {
digitalWrite(ledPin, HIGH);
delay(200);
digitalWrite(ledPin, LOW);
delay(200);
}
Serial.begin(115200);
}
void loop() {
// Считываем положение джойстика по X
int xVal = analogRead(xPin);
// Убедимся, что значение в интервале от 0 до 1023
xVal = constrain(xVal, , 1023);
// Выставим соответствие считанному значению и углу поворота сервы
// Сделал небольшой люфт
int angle = map(xVal, , 1023, 170, 20);
// Поворачиваем серву
servo.write(angle);
// Ждем 15 милисекунд, что бы серва успела повернуться
delay(15);
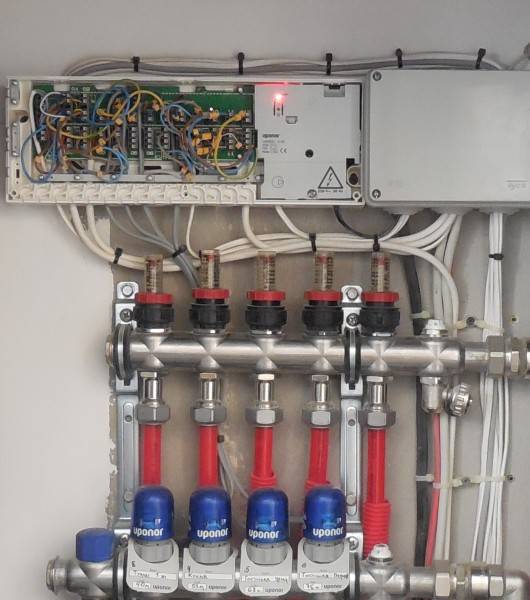
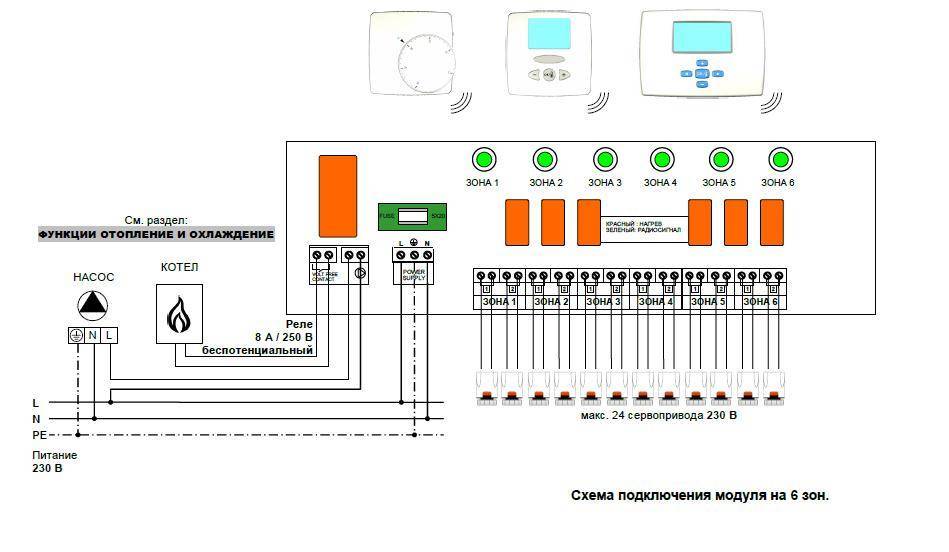
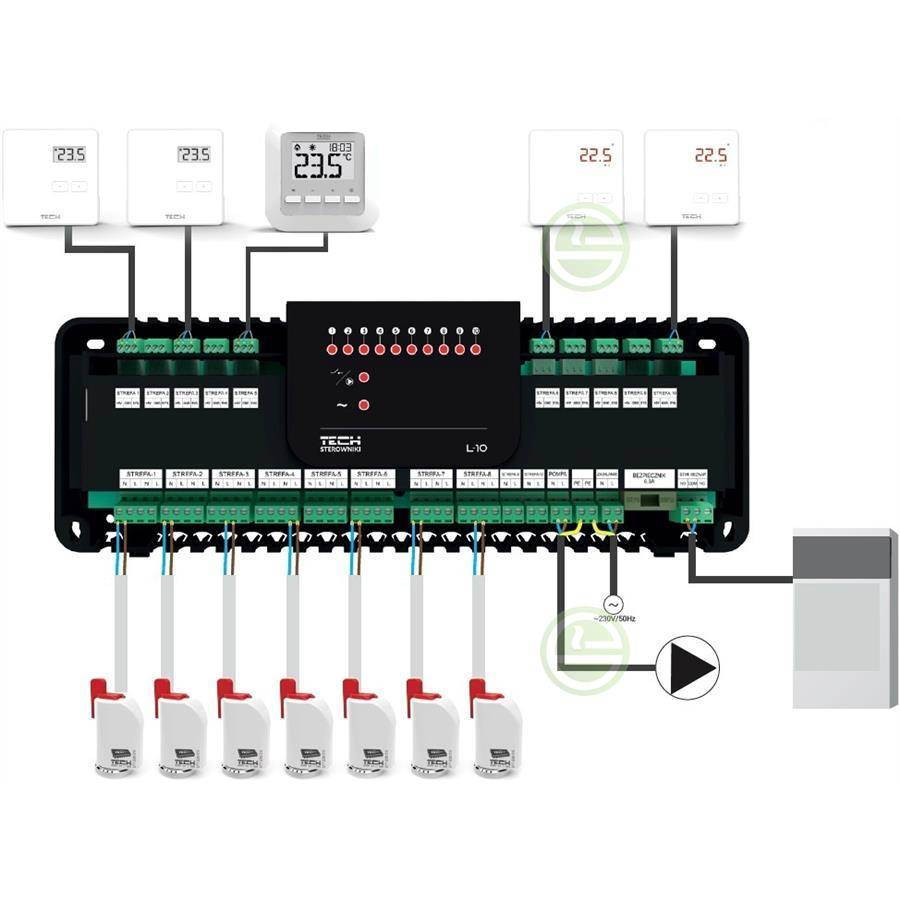
} Автоматизации теплого пола
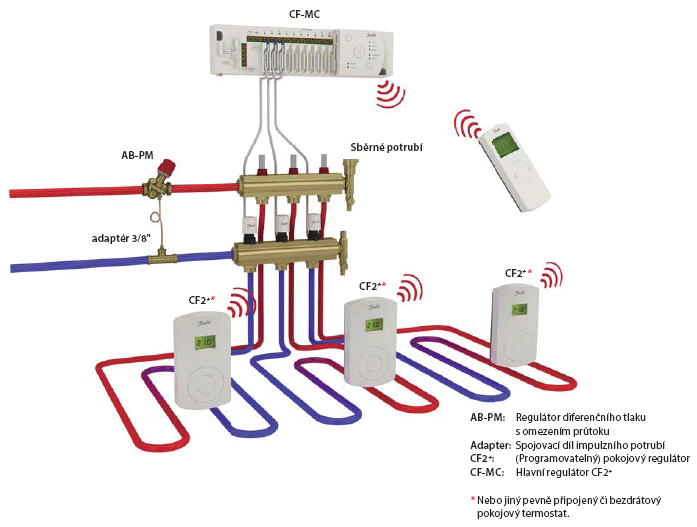
Не будем рассматривать вопросы, касающиеся монтажа водяного теплого пола и схем его подключения к котлу. Остановимся подробнее на автоматике такой системы.
Устанавливая систему можно пойти простым путём. Запитать трубы к котлу, используя коллектор в качестве соединяющего элемента и наслаждаться теплыми полами. Но такую систему крайне сложно регулировать. Она будет функционировать сама по себе, и добиться желаемой температуры пола не получится. Чтобы была возможность регулировать температуру, необходимо систему оснастить дополнительными элементами. Мы подробно остановимся на описании сервопривода. Без этого элемента ни о какой автоматике речи идти не может.
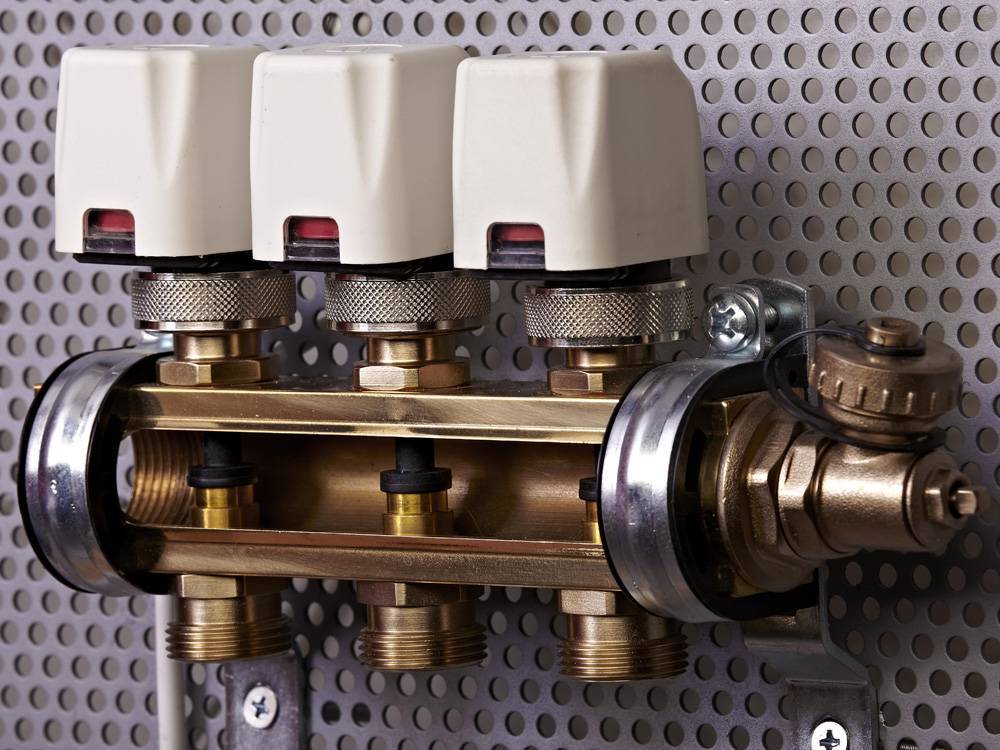
Сервопривод представляет собой электротермическое устройство небольших размеров, оснащенное светодиодами. Его задача состоит в том, чтобы закрывать и открывать подачу воды, которая выступает в качестве теплоносителя в системе.
Принцип действия сервопривода достаточно прост. Его устройство включает в себя наличие герметичного и эластичного элемента, имеющего форму цилиндра и называющегося сильфон. Это основной элемент устройства. Внутри цилиндра находится вещество. Под воздействием температуры оно изменяется в объеме. Снаружи сильфона, который работает в паре с термостатом, находится электрический нагревательный элемент. Если температура теплого пола в системе ниже необходимой, на нагревательный элемент начинает поступать питание.
При повышении температуры вещество, которое очень чувствительно к ее изменению, начинает расширяться. Естественно, меняет свои размеры и цилиндр, на определенном расстоянии от которого расположен шток. Увеличившись, цилиндр оказывает давление на шток. Это, в свою очередь, ведет к перекрытию потока носителя тепла. Сервопривод устроен достаточно просто. Его механизм не содержит шестеренок или моторов.
Можно встретить устройства, которые не оснащены таким цилиндром. Его место занимает компенсационный термоэлемент. При подаче питания он нагревается, меняет свое местоположение и оказывает давление на шток. Но они при монтаже теплых полов практически не используются.
Что же касается разновидностей сервоприводов, то они бывают двух типов: нормально закрытые и нормально открытые. Название они получили от того, как расположен клапан в случае отсутствия питания. Соответственно в нормально открытом сервоприводе он открыт. Как только поступает питание, клапан автоматически закрывается. Второй устроен наоборот. Что касается механизма действия, то он одинаков в первом и втором случае.
Для того, чтобы определиться закрыт клапан или открыт, нужно посмотреть в окошко, расположенное на устройстве. У нормально закрытого сервопривода присутствие в окошке флажка красного цвета говорит о том, что питание не поступает и, следовательно, клапан закрыт. Если устройство нормально открытого типа, то его окошко при отсутствии подачи питания открыто.
С одной стороны, целесообразно оборудовать систему нормально открытым устройством. В случае поломки такого сервопривода вода в трубах не замерзнет. С другой же стороны, термостаты, которые представлены вниманию потребителя, в большинстве своем делаются под нормально закрытые устройства. При обустройстве системы именно таким типом сервопривода желательно дополнительно установить инвертор или другой источник поступления электроэнергии. В противном случае, при отключении электричества жидкость в уложенных трубах циркулировать не будет.
В зависимости от технических характеристик помещения можно использовать сервопривод, работающий от постоянного тока или переменного.