Как зайти в настройки
- Установить контроллер
- Проверить правильность подключения и померять напряжения на блоке питания и проверить полярность
- Включить станок
- Нажать кнопку ESC на панели управления, чтобы лазерная головка не уехала в неправильном направлении. В случае проблем нажимайте красную кнопку экстренной остановки.
- Запустить программу Rdworks, если не установлена, то установить.
- В программе открываем настройки FILE/VENDOR PARAMETER/пароль “rd8888”
- Нажимаешь кнопку READ. Если не открывается, то настраиваешь драйвер USB или LAN
- Переходим в настройки моторов X и Y
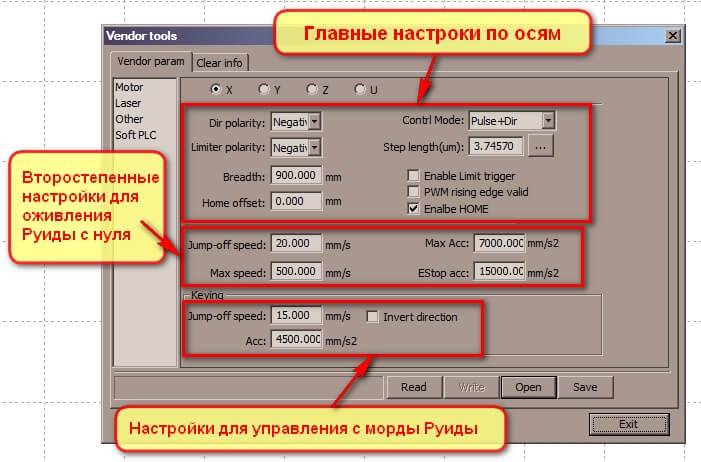
Настройка параметров осей
- Contrl mode: Pulse+Dir
- Dir polarity: Positive или Negative относительно Декартовой системы координат, где НОЛЬ в левом нижнем углу
- Limiter polarity: Negative (NPN) – если концевой датчик свободно разомкнут (наиболее часто именно этот вариант) или Positive (PNP) – если концевик свободно замкнут
- Step lenght: 5 – Деление микрошага (Передаточные числа)
- Breadth:
- Размер рабочего стола по оси X (ширина): 900 (если станок 900х600)
- Размер рабочего стола по оси Y (глубина): 600 (если станок 900х600)
- Home offset: 5 – Отступ от концевого датчика после прихода в машинный ноль (HOME)
- Enable HOME: ставим галочку (При включении станка концевые датчики начнут работать, как настроить чтобы станок перемещался в машинный ноль HOME, смотрите ниже)
- Нажимаем Write (записать)
Станок должен после включения начать двигаться в сторону концевых датчиков вашего станка. Если что-то пошло не так, то нажимаем ESC, заходим в настройки и проверяем настройки Contrl mode и Dir polarity. Если станок пришел правильно к концевому датчику, но не отрабатываем датчик, то смотрим параметр Limiter polarity:
После окончания любой настройки выставляйте лазерную головку строго в центр рабочего стола лазерного станка, чтобы избежать механический повреждений при включении, если вы сделали неправильные настройки. Обязательно держите руки на кнопке экстренной остановки или ESC.
Настройка скоростей перещений
Заходим в настройки контроллера и вносим коррекцию. Сначала вводим данные ниже и записываем.
- Jump-off speed: 20 mm/s
- Max speed: 500 mm/s
- Max Acc: 7000 mm/s2
- Estop acc: 15000 mm/s2
- Записываем данные Write
Если что-то пошло не так, то настраиваем ускорение Max Acc понижая значение. Если станок не может двигаться на максимальной скорости, выставленной с панели управления, то понижаем параметр Max speed, если можем, то повышаем.
Проверяем работу кнопок управления перемещением
Выставляйте лазерную головку строго в центр рабочего стола лазерного станка
- Включаем станок
- Нажимаем на панели ESC
- Нажимаем кпоки перемещение
Если перемещение не корректное, то переходим в настройки и на оси, которая не правильно работает, ставим галочку invert direction.
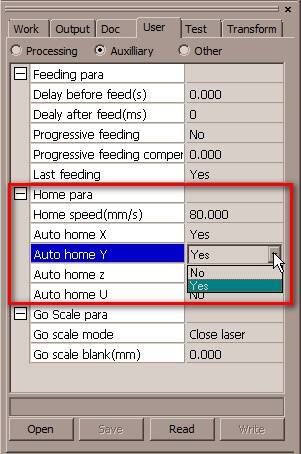
Настройка перемещения станка в машинный ноль
1. Заходим в пользовательские настройки
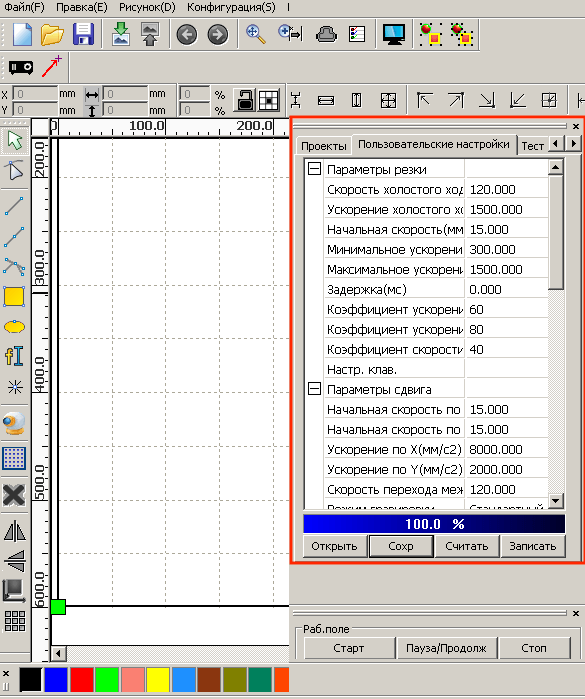
2.Выбираем соответствующие поля по каждой оси
3. Нажимаем Read
4. Настриваем ось
5. Нажимаем White
Правила участия в Сервомарафоне:
Марафон по сервоприводам проводится в инстаграме, полезные материалы и задания будут размещаться в статьях в моём канале zen.yandex и на Youtube.
- Для закрепления материала, изложенного в статье вам необходимо решить задачу в конце статьи.
- Если у вас есть ардуино и сервопривод для тестов, то нужно записать короткую демонстрацию работы программы и механизмов, и выложить на своей страничке в инстаграме, с упоминанием @robot_i_ya, @alexyurichk и хештеги ##сервоМарафон #servoMarafon.
- Если нет ардуино, но вы являетесь учеником робоклуба “Робот и Я”, то в чатах групп будут указаны почты. Присланные решения будут выложены отдельным видео, в случае работоспособности кода программы
- Правильно выполнивший наибольшее количество заданий за весь период сервомарафона получит символический приз для усовершенствования своего конструктора HUNA-MRT и создания новых проектов
- В случае равенства лидеров сервомарафона, критериями будут аккуратность кода и первенство выполнения
Существующие виды сервоприводов на сегодняшний день
Среди существующих на сегодняшний день регуляторов, получивших распространение в быту, встречаются следующие сервоприводы. Все приборы можно разделить на несколько видов. Каждая разновидность отличается принципом действия и функционалом. По типу конструкции устройства бывают двух видов:
- закрытые;
- открытые.
По названиям можно судить о принципе действия. Для закрытых сервоприводов характерным является открытое положение при отсутствии питания. Поступающие сигнал приводит в действие механическую часть, перекрывая доступ воды в систему. Для устройств открытого вида, принцип действия в обратном порядке. В обычном состоянии сервопривод закрыт, только с поступлением сигнала механическая часть приводится в действие, открывая поступление воды в трубопровод. О том, какой вид лучше подходит для бытового использования, судить вам, оценивая возможности собственной системы обогрева и климатические условия за окном. Чаще всего используются у нас в стране нормально открытые сервоприводы.
По способу питания сервомоторы делятся на приборы, питающиеся постоянным поток напряжением 24В и устройства, подключаемые к обычной электросети переменного тока напряжением 220В. Сервоприводы с питанием в 24В оснащаются инверторами.
Нередко потребители используют еще один, достаточно редкий вид устройств. Речь идет о приборах, которые выставляются в нормальное положение в зависимости от технологических требований отопительной системы. Такие сервоприводы называются универсальными и могут менять функциональность с нормально открытого состояния на нормально закрытое состояние, и наоборот.
Подключить к коллектору можно все три вида сервомоторов. Единственное условие, правильная настройка, балансировка и условия эксплуатации отопительной системы.

Виды, технические характеристики, отличия
На сегодняшний день, существует несколько видов сервомоторов. Наиболее используемые механизмы можно представить по способу их действия следующим списком:
- механические;
- электронные;
- электротермические;
- дистанционные.
Механические
Самый простой прибор для управления. Он не представляет сложный механизм. Для регулировки степени нагрева нужного контура достаточно будет повернуть рукой головку прибора на возвратной гребёнке влево или вправо соответственно для увеличения или уменьшения нагрева петли тёплого пола. Устанавливать ручной вентиль целесообразно там, где система отопления состоит из 2 – 3 контуров и особая автоматика не требуется.
Последующая настройка не требуется так, как регулировка происходит автоматически. Одним из достоинств механического приспособления является невысокая стоимость и долгий срок службы. К недостаткам можно отнести то, что отсутствует возможность программирования работы сервопривода коллектора для тёплого пола. Поэтому, покидая жилище, хозяин должен устанавливать необходимый температурный режим вручную.
Электронные
Электронные модели оснащены жидкокристаллическими дисплеями, на которых отображаются этапы работы сервоприводов.
Это можно делать, как автоматически, так и вручную.
Электротермические
Приборы данного вида являются двухпозиционными исполнительными механизмами в автоматизированных системах тёплых полов. На корпусе сервопривода расположены два светодиода. Зелёный свет горит при подаче напряжения на привод, синий индикатор загорается, когда клапан открыт. Если питание отключено, оба индикатора гаснут.

Дистанционный
Главным отличием от других моделей дистанционный сервопривод можно программировать онлайн. Сервопривод имеет два датчика, которые отслеживают изменения температуры снаружи и внутри помещения. Дистанционные приборы имеют 9 режимов эксплуатации. Помимо этого, регуляторы способны выдавать информацию на дисплей термостата о количестве потреблённой электроэнергии.
Кроме этого, существуют приводы закрытого и открытого типа. Первые находятся в закрытом положении по умолчанию, а вторые практически всегда открыты.
Плюсы и минусы
Рассматриваемые силовые агрегаты обладают целым набором особенностей, и, если сравнивать их с шаговыми, можно выделить ряд достоинств.
В числе объективных преимуществ:
- точное, зачастую даже прецизионные позиционирования;
- быстрое повышение крутящего момента и понижение числа оборотов за счет использования редуктора;
- беспроблемная коррекция – внести в программу изменения можно за считаные минуты, отрегулировав перемещение рабочего инструмента по первым полученным практическим результатам;
- отличная переносимость физических, температурных и других нагрузок в течение длительного времени безостановочной эксплуатации;
- развитие значительных ускорений, обеспечивающее замечательную совместимость с быстродействующим оборудованием, например, с универсальными станками ижевского ;
- поддержание равномерного крутящего момента во всем рабочем диапазоне.
Использование сервопривода не тотальное только потому, что он также обладает некоторыми недостатками.
В списке относительных минусов:
- при наличии пластиковых шестеренок или деталей из мягкого металла редуктор становится «слабым звеном», выходящим из строя под интенсивными воздействиями;
- резистивные дорожки изнашиваются в сравнительно краткие сроки (актуально для моделей с потенциометром);
- такой силовой агрегат стоит дороже шагового;
- программа, подходящая для обеспечения высокой точности, на практике часто оказывается сложной в настройке.
Ясно, что преимущества оказывают гораздо более важное влияние, и именно они обуславливают значительную степень востребованности в самых различных сферах

Виды и характеристики
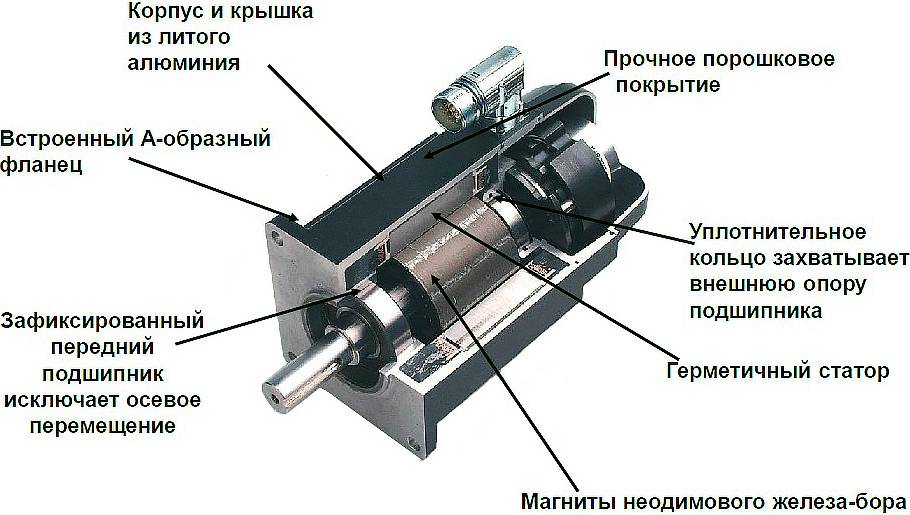
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
![Сервоприводы: устройство, принцип работы и основные виды [амперка / вики]](https://gaz-pgo.ru/wp-content/uploads/2/7/a/27a7be7a75332ebfd1dd28bc24629b90.jpeg)



Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.
В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Причина популярности сервопривода
 Можно задаться вопросом: почему несколько лет назад практически никто не знал про сервопривод, если это только не касалось специальности, а сейчас очень многие люди используют его чуть ли не во всех промышленных сферах, и он всё обретает популярность всё сильнее и сильнее? Почему он всем нужен?
Можно задаться вопросом: почему несколько лет назад практически никто не знал про сервопривод, если это только не касалось специальности, а сейчас очень многие люди используют его чуть ли не во всех промышленных сферах, и он всё обретает популярность всё сильнее и сильнее? Почему он всем нужен?
Пожалуй, стоит начать с того, что они обладают отличным функционированием и качеством. Точность сервоприводов находится на очень высоком уровне, давая возможность управлять любыми приборами с его помощью без погрешностей. Настройка сервопривода является очень простой и практически не отнимает времени, если следовать инструкции.
Все устройства содержат различные конструкции, которые им помогают поддерживать скорость в механизмах. Чаще всего их используют для промышленных роботов, а также в станках, если они обладают высокой точностью. Промышленные роботы обладают высокой эффективностью. Стоит заметить, для создания роботов используются сервоприводы вращательного движения.
Он имеет больший диапазон контроля скоростей, что не может не входить в список плюсов этого устройства. Одна из основных проблем с устройствами, которые чем-либо похожи с сервоприводом состоит в том, что устойчивость к помехам этих устройств является очень маленькой, это делает работу с ними невозможной. Устройство обладает высокой устойчивостью к помехам, тем самым это позволяет спокойно работать с этим устройством.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя. Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
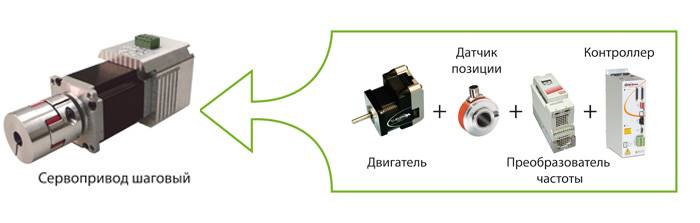
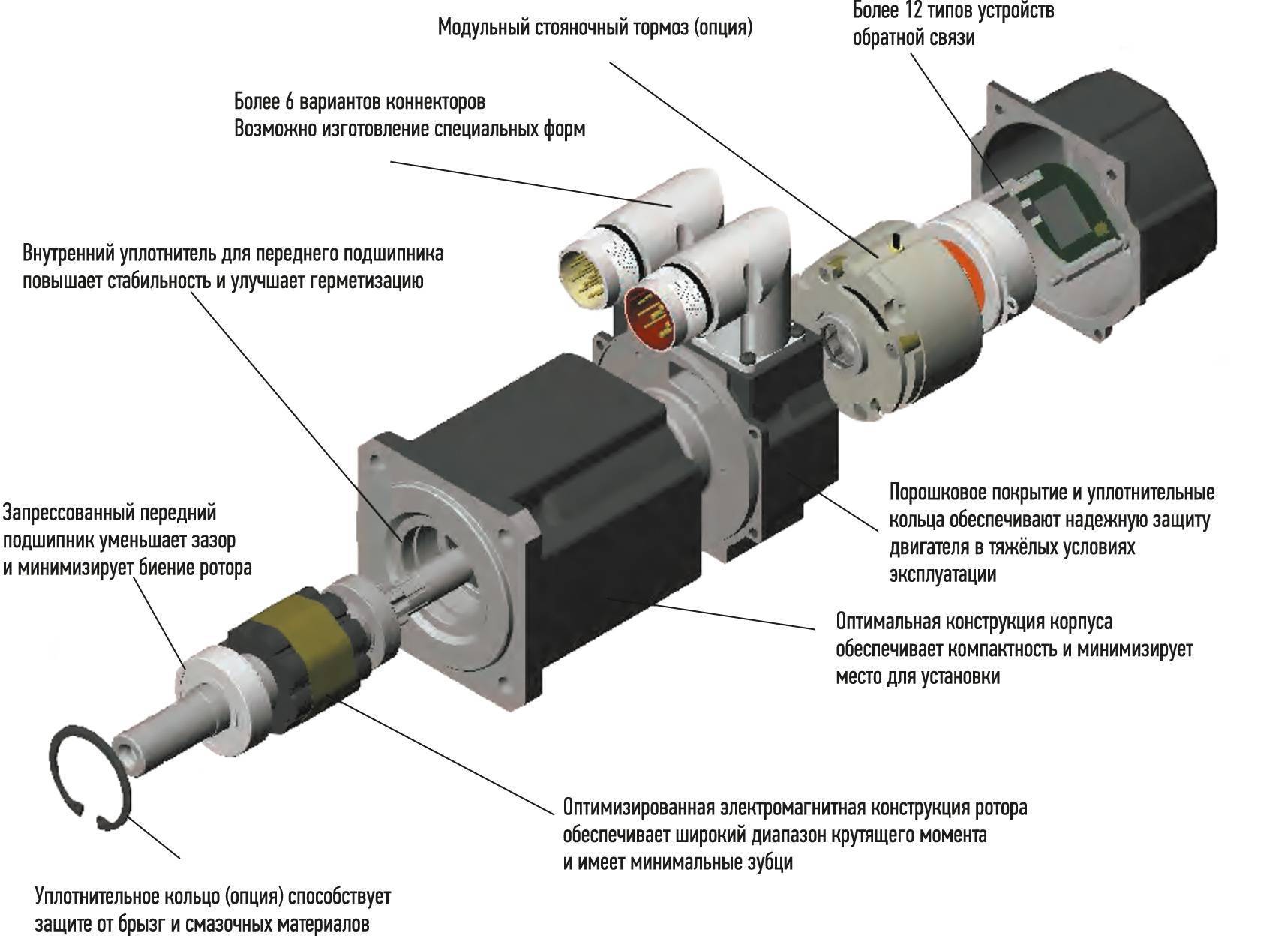
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.


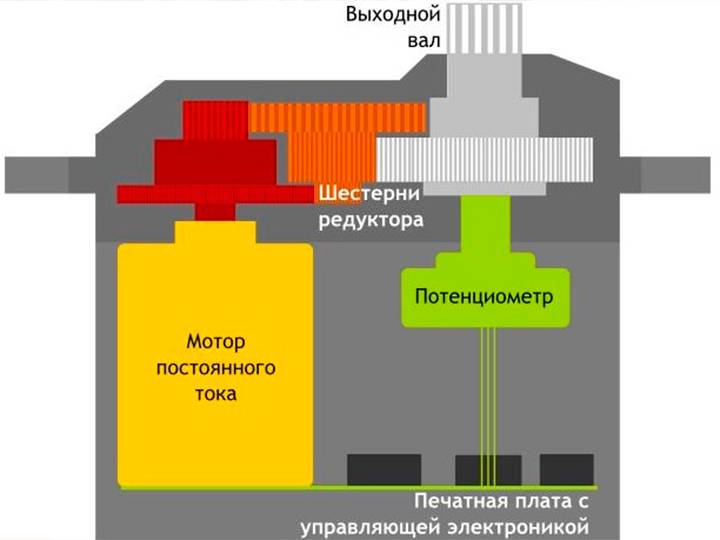
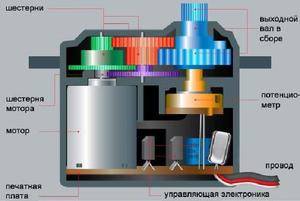
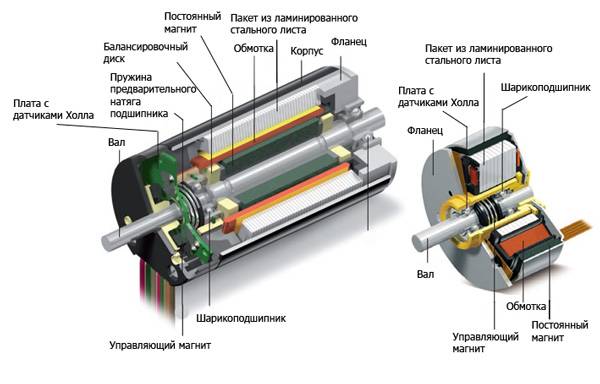
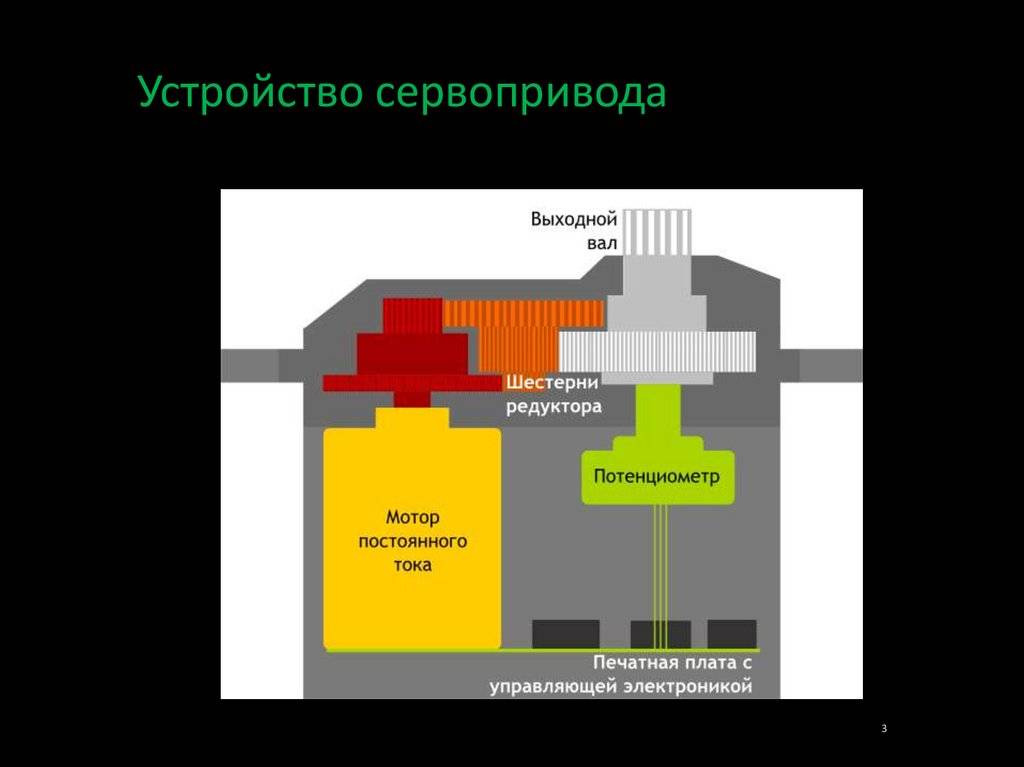
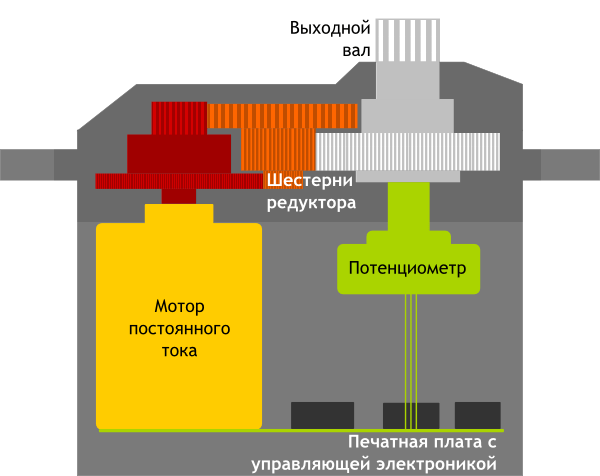
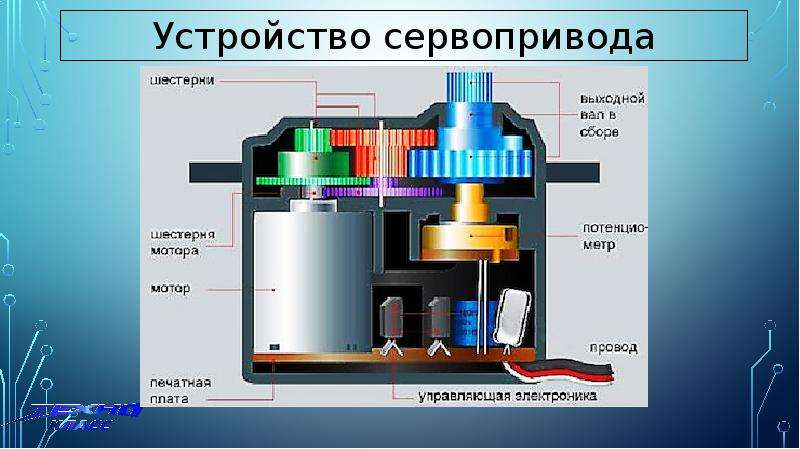
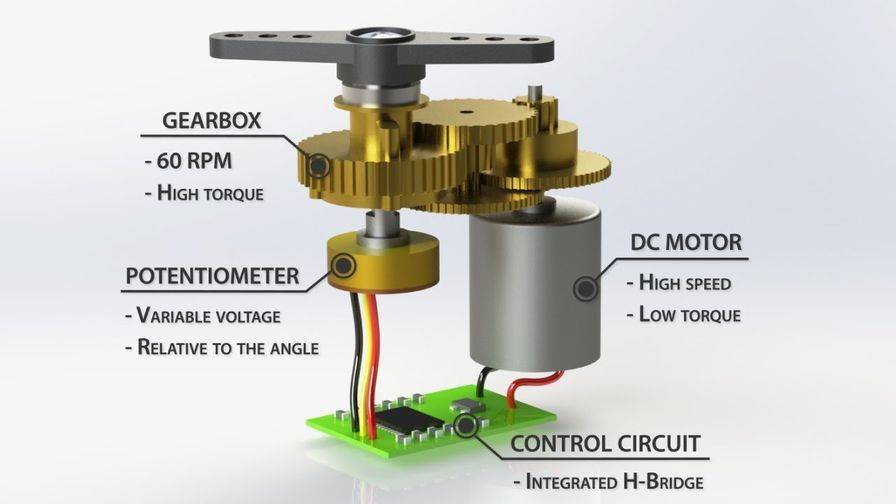
Базовым движущим элементом сервопривода — является электродвигатель (так называемый «сервомотор» или «серводвигатель«). Электродвигатель — это электромеханическое устройство (машина) для преобразования электрической энергии в механическую.

Электродвигатель (или электромотор) состоит из двух основных частей: из статора, часто неподвижной части и из ротора (или якоря) — подвижной вращающейся части. Электродвигатели бывают разных типов и конструкций. Каждый тип электродвигателя имеет свои особенности и, соответственно, эксплуатационные характеристики, которые определяют применение электродвигателя на практике.

Применение сервоприводов
— Шаговые электродвигатели — применяются в основном в бюджетных решениях сервоприводов.
Шаговый двигатель представляет собой бесколлекторное устройство электромеханического типа, имеющее несколько обмоток. На шаговый двигатель подаются короткие электроимпульсы, при помощи драйвера, которые последовательно активируют каждую из обмоток и приводят в движение ротор, вызывая угловые дискретные (или так называемые шаговые) перемещения. От сюда и берется название «шаговый» электродвигатель.
— Синхронные электродвигатели — универсальные сервоприводы для для высокоточных применений и пр.
— Асинхронные электродвигатели — универсальные сервоприводы для насосной и компрессорной техники, подъемных механизмов и пр.
— Линейные электродвигатели — относительно дорогие, сверхточные сервоприводы для скоростного перемещения полезной нагрузки, для высокоточных порталов, прецизионные станки, научное оборудование и пр.
Типы сервоприводов
Конструктивно сервопривод СПШ можно разделить на следующие основные блоки:
- гибридный шаговый двигатель с габаритами NEMA 23 и 34;
- преобразователь частоты на основе высокопроизводительного DSP процессора;
- блок управления (сервоконтроллер и программируемый логический контроллер в одном корпусе);
- датчик позиции вала мотора.
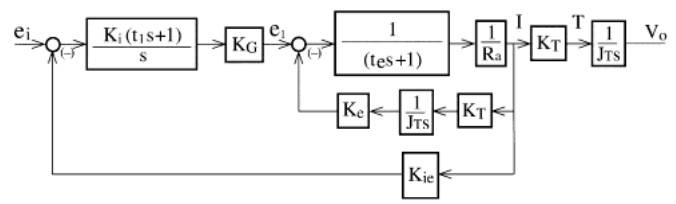
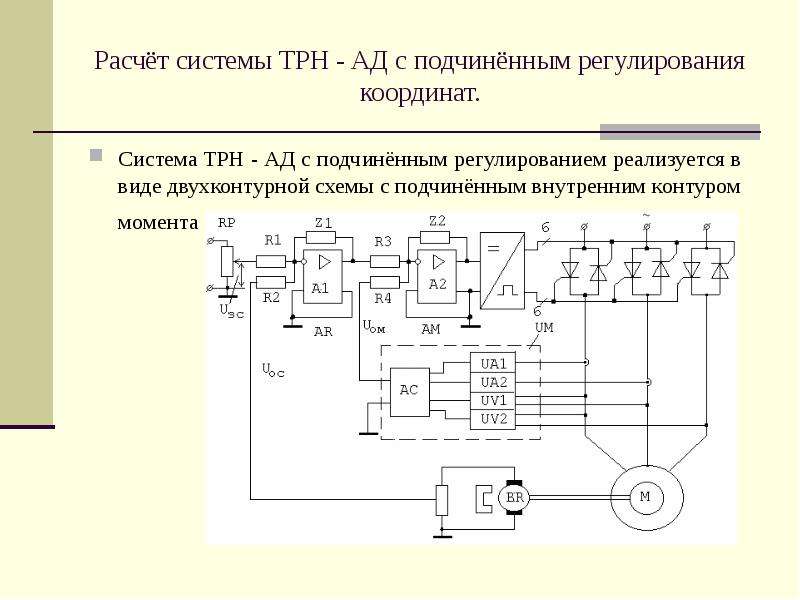
Сервопривод — конструктивные особенности
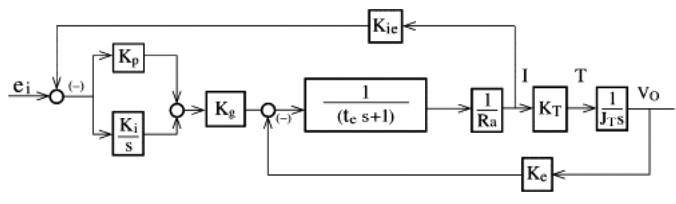
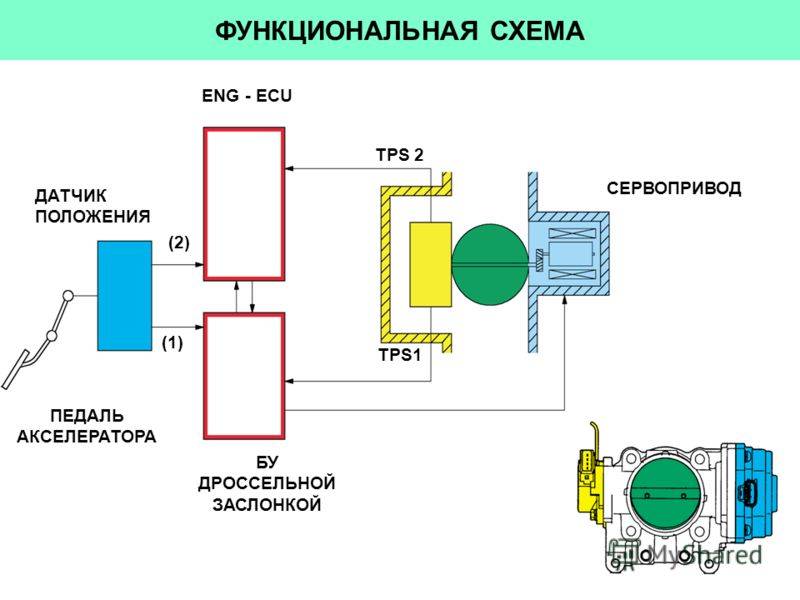
Если блок-схема на рисунке выше не реализуема, следующая болк-диаграмма разделяет серво-петли на внутреннюю и внешнюю:
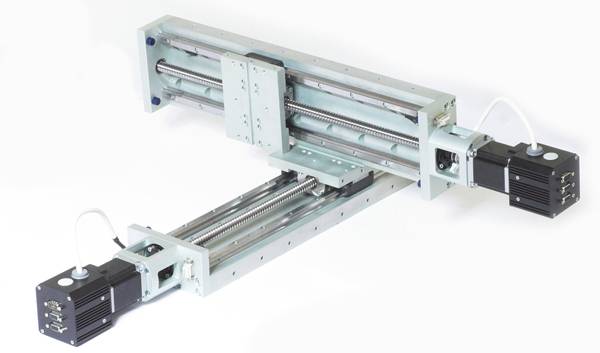
Сервоприводы — в действии

Сервоприводы и сервомоторы для ЧПУ — в Сервотехнике!
Компания «Сервотехника» более 20 лет поставляет серводвигатели (сервомоторы) следующих производителей: асинхронные серводвигатели Fukuta, серводвигатели фирмы KEB (Германия), сервомоторы компании LS Mecapion и сервоприводы Wittenstein. Имеются собственные разработки серводвигателей, производимые внутри России на собственном заводе. Вся продукция сертифицирована и имеет официальную сервисную гарантию




Купить — Сервопривод (серводвигатель)
В Сервотехнике – Вы можете купить комплектные сервоприводы, серводвигатели/сервомоторы, высоконадежные промышленные частотные преобразователи, редукторы и мотор редукторы известных европейских производителей.
Простой тестер сервоприводов с индикатором
Сервотестер это прибор, предназначенный для проверки работоспособности сервопривода, определения его крайних углов, скорости передвижения, минимального шага, а также рысканья. Он может быть очень полезен строителям роботов, так как позволяет запустить привод и проверить функционирование модели до того как готова управляющая электроника. Подобные штуки используют в магазинах радиоуправляемых моделей для демонстрации покупателям возможностей сервомашинок. Однако, хочется иметь подобную вещь под рукой всегда. Конечно, можно купить самые разные тестеры, но гораздо интереснее сделать самому. В этой статье я хочу поделиться опытом изготовления тестера сервоприводов в домашних условиях. Мой тестер управляется энкодером, имеет несколько режимов работы, а также оснащен индикатором для отображения текущего угла.
Схема и работа
В основе принципиальной схемы лежит микроконтроллер Attiny2313. Непосредственно к нему через транзисторы подключен семисегментный трехразрядный индикатор с динамической индикацией. На индикатор выводится текущее значение угла и режим работы. Для управления служат кнопка и энкодер. При нажатии на кнопку включается один из следующих режимов: 1 — приращение угла по 0,1 градусу 2 — по 1 градусу 3 — по 10 градусов 4 — перемещение вала между крайними точками (0 либо 150 градусов) Энкодер изменяет текущий угол в большую или меньшую сторону, в зависимости от направления вращения. Кнопка и один из выводов энкодера подключены напрямую к внешним прерываниям МК. В момент нажатия на кнопку на пол секунды выводится текущий режим. Во время этих манипуляций на выводе PD6 МК присутствуют импульсы с длительностью от 0,8 до 2,3мс и частотой 50Гц. О самом алгоритме формирования управляющего сигнала я уже писал ранее. Схема имеет возможность питаться от источника постоянного напряжения 5В, либо от 7-12В. Выбор питания задается перемычкой.
Конструкция
Разработаны подробные чертежи самой платы (конечно, односторонней),…
… сборочный чертеж лицевой… … и обратной стороны устройства
Обратите внимание на перемычки J1-J4. Это резисторы с нулевым сопротивлением в корпусе 1210
Сборка и настройка
Как видно на чертежах на лицевой стороне находятся исключительно необходимые элементы управления, индикации, а также клеммы для подключения питания. Плату без труда можно изготовить в домашних условиях при помощи ЛУТ (не забудьте сделать рисунок платы зеркальным!). У меня она выглядит вот так:
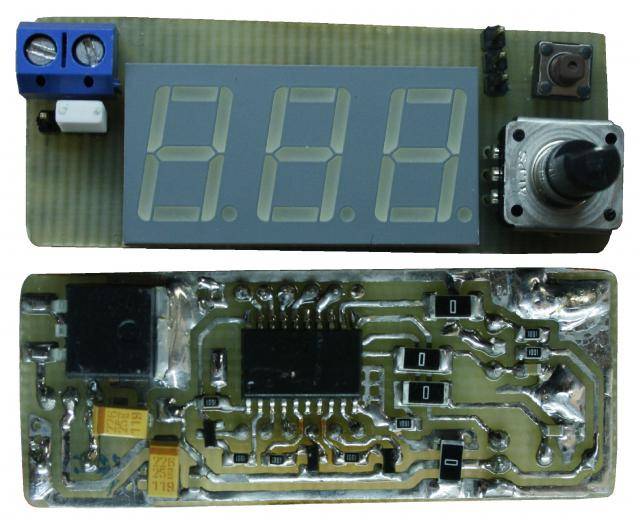
Для программирования придется припаяться проводами к плате. Я специально развел ноги MOSI, MISO, SCK на индикатор, а на сигнале RESET оставил контактную площадку. При программировании фьюзы менять не надо, файл прошивки, печатная плата и список для покупки — в конце статьи.
Вместо заключения
В качестве достоинств своего устройства хочется отметить, что не часто у сервотестеров есть индикатор, особенно при стоимости менее 200р. В будущем я хочу добавить в прошивку еще два режима — для определения крайних углов и режим автоматического изменения угла. И, конечно, плата, hex-файл и список для покупки.UPD:
Основная статья теперь хранится здесь.
Режимы управления
Работа сервопривода может осуществляться в трех разных форматах. Рассмотрим каждый из них.
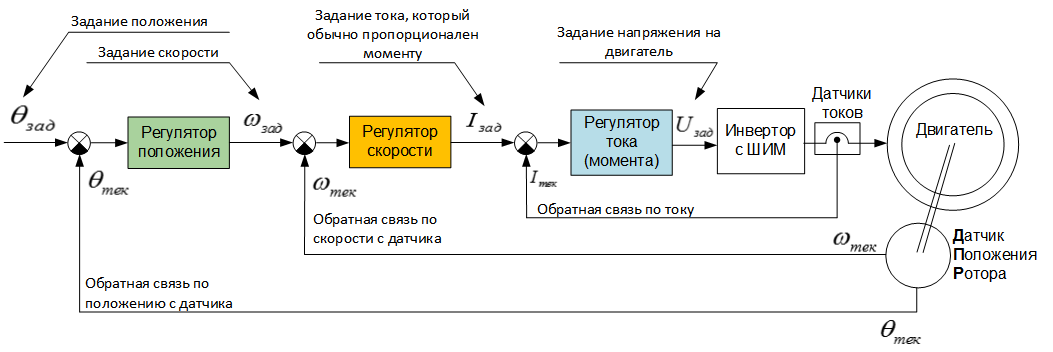
Контроль положения
Здесь нужно сохранять заданный угол поворота вала, подавая последовательность сигналов. Пусть они идут с контроллера – таким образом, можно обеспечить точное позиционирование, что особенно актуально для узлов производственных станков.
Обратите внимание, с помощью совокупности импульсов не проблема задать информацию не только о положении в пространстве, но и о векторе вращения или скорости движения. Сделать это можно одним из трех способов – направляя напряжение:
- со сдвигом фазы на 90 градусов;
- сразу на два входа (SIGN, PULSE – стандартные названия);
- с перемещением по часовой стрелке или против.
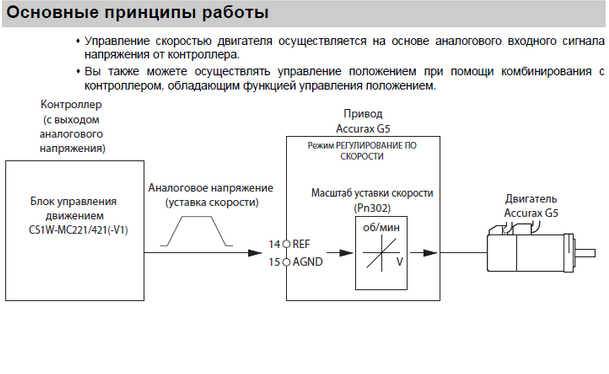
Контроль скорости
Здесь сервоуправление – это увеличение или уменьшение аналогового сигнала на дискретную величину при его подаче на соответствующие обмотки. А если он еще и разнополярный, тогда не составляет труда быстро менять направление вращения.
Данный режим напоминает эксплуатацию асинхронного силового агрегата с преобразователем частоты. Потому что в ее рамках требуется постоянно выполнять разгон и замедление, задавать минимумы и максимумы и тому подобное. Главное – реализовывать не слишком сложный алгоритм, чтобы не превращать рядовую практическую задачу в непосильный труд программирования.
Контроль момента
В данном случае назначение сервопривода – обеспечивать стабильное число оборотов, вне зависимости от того, вращается двигатель или нет. Эта цель достигается путем подачи или дискретного сигнала, или аналогового двухполярного. Метод более чем актуален для оборудования, в процессе эксплуатации требующего смены давления, прижима или других параметров.
Внимание, силовой агрегат должен быть дополнительно оснащен встроенным датчиком тока, ведь именно последний и оценивает значение текущего момента, чтобы потом электроника могла сравнить его с необходимой величиной

Установка проприетарных драйверов Linux
Некоторые производители не хотят открывать исходный код своих драйверов, поэтому для поддержки оборудования выпускают проприетарные драйвера в Linux с закрытым исходным кодом. Большинство дистрибутивов Linux не включают такие драйвера в свой состав, а значит они не смогут их автоматически определить и загрузить.
Чаще всего нам приходится сталкиваться с проприетарными драйверами для видеокарт, например, для NVIDIA, которые обеспечивают лучшую производительность в играх на Linux. Конечно, есть драйверы ядра Linux с открытым исходным кодом, которые заставят вашу видеокарту работать, но они не могут обеспечить достаточный уровень производительности в 3D играх. Некоторые драйвера wifi по прежнему закрыты, поэтому ваше оборудование не будет работать пока вы их не установите.
Установка драйверов в Linux зависит от вашего дистрибутива. В Ubuntu и основанных на ней дистрибутивах есть специальный инструмент – Дополнительные драйверы.

Программа определит, какие проприетраные драйверы устройств Linux можно установить и предложит скачать и установить их. В Linux Mint тоже есть инструмент менеджер драйверов, он работает аналогично инструменту в Ubuntu. Fedora – против проприетарных драйверов Linux и здесь нет никакого способа их установить. Во многих дистрибутивах проприетарные драйверы устройств linux можно найти в неофициальных репозиториях. Каждый дистрибутив решает эту проблему по-разному.
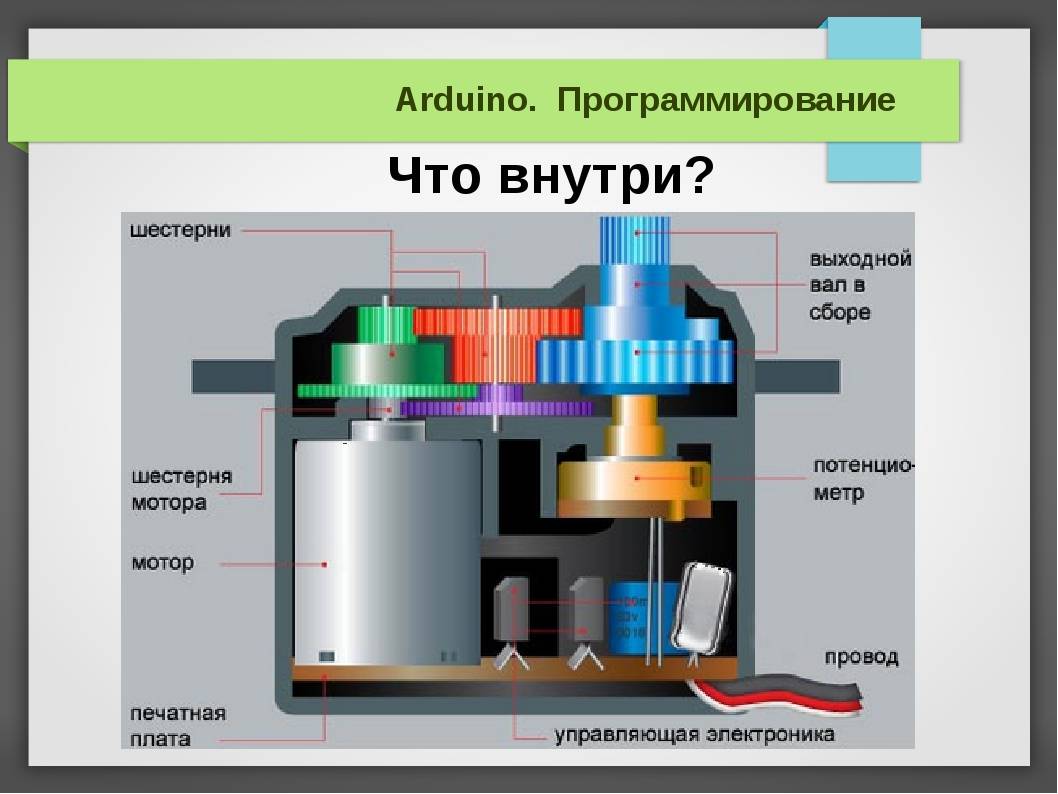



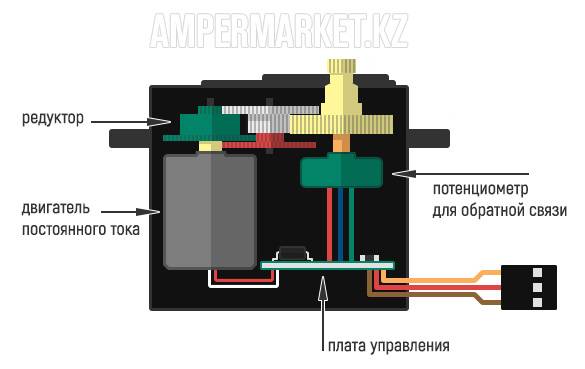
Как работает сервопривод
Принцип его действия завязан на использовании импульсного сигнала, обладающего тремя ключевыми свойствами, – частотой, наименьшей и наивысшей продолжительностью, и как раз последняя, то есть длина, и задает угол поворота. Может находиться в диапазоне 0,8-2,2 мс. Как только поступает на печатную плату, активирует энкодер (потенциометр) и, через механическую передачу, выходной вал.
Электронная схема сравнивает реальное положение вала с запрограммированным. При этом возможно 3 состояния. И первое из них – нулевой момент, то есть полного совпадения, что значит – силовой агрегат не работает (остановлен). При втором управляющий сигнал выше опорного, это провоцирует поворот в одну сторону, при третьем – ниже, что оборачивается движением вращающейся части в другом направлении.
Таким образом, принцип работы сервомотора сводится к следующему:
- привод получает импульс на вход, допустим, команду изменения угла;
- блок управления соотносит полученный сигнал с фактическими значениями, снятыми датчиком;
- исходя из результатов анализа, данная плата выдает команду – перемещения по какому-то вектору, ускорения или замедления, – причем обязательно направленную на то, чтобы привести реальную цифру к заданной и необходимой.
Сравнение осуществляется на основании разностных величин и учитывает параметр длительности, а поэтому определяет разбежку показателей с максимальной точностью. Эта особенность дает возможность обеспечить необходимое позиционирование инструмента.
Основные характеристик изделия
Работа сервопривода характеризуется двумя основными показателями: скоростью поворота и усилия на валу. Первая величина служит показателем времени, которое измеряется в секундах. Усилие мерится в кг/см, то есть, какой уровень усилия развивает механизм от центра вращения.
Вообще данный параметр находится в зависимости от основного назначения устройства, а уже потом от числа передач редуктора и используемых в устройстве узлов.
Как уже упоминалось, сейчас выпускают механизмы, функционирующие при показателе напряжения питания от 4,8 до 6 В. Чаще этот показатель равен 6 В. Однако не все модели рассчитаны на широкий диапазон напряжений. Иногда двигатель сервопривода работает лишь при 4,8 В или же только при 6 В (последние конфигурации производятся крайне редко).